Documentation (OpenOCL v7)
This is the documentation of the current version OpenOCL v7.
In OpenOCL you can solve a large class of optimal control problems including non-linear, continuous-time, multi-stage, and constrained problems, which can appear in the context of trajectory optimization and model predictive control. The types of dynamical systems that are supported are all systems that can be described by ordinary differential equations or differential algebraic equations.
In the following we give a short introduction to the concepts used and introduced in OpenOCL. Scroll down or use the navigation on the left to look for specific classes and functions.
Cost terms and constraints
We support bounds that hold along the entire trajectory, and grid-constraints that hold only at specific gridpoints $\tau_k$ in the discretized trajectory. You can specify the gridpoints by using the argument N for in ocl.Problem.
For the cost terms you can specify path-costs that are integrated along the trajectory (also known as Lagrange term), and grid-costs that can be specified for specific points on the discretized trajectory.
Optimal control problem definition (single-stage)
For optimal control problems with a single stage (most problems), OpenOCL supports the following type of optimal control problems:
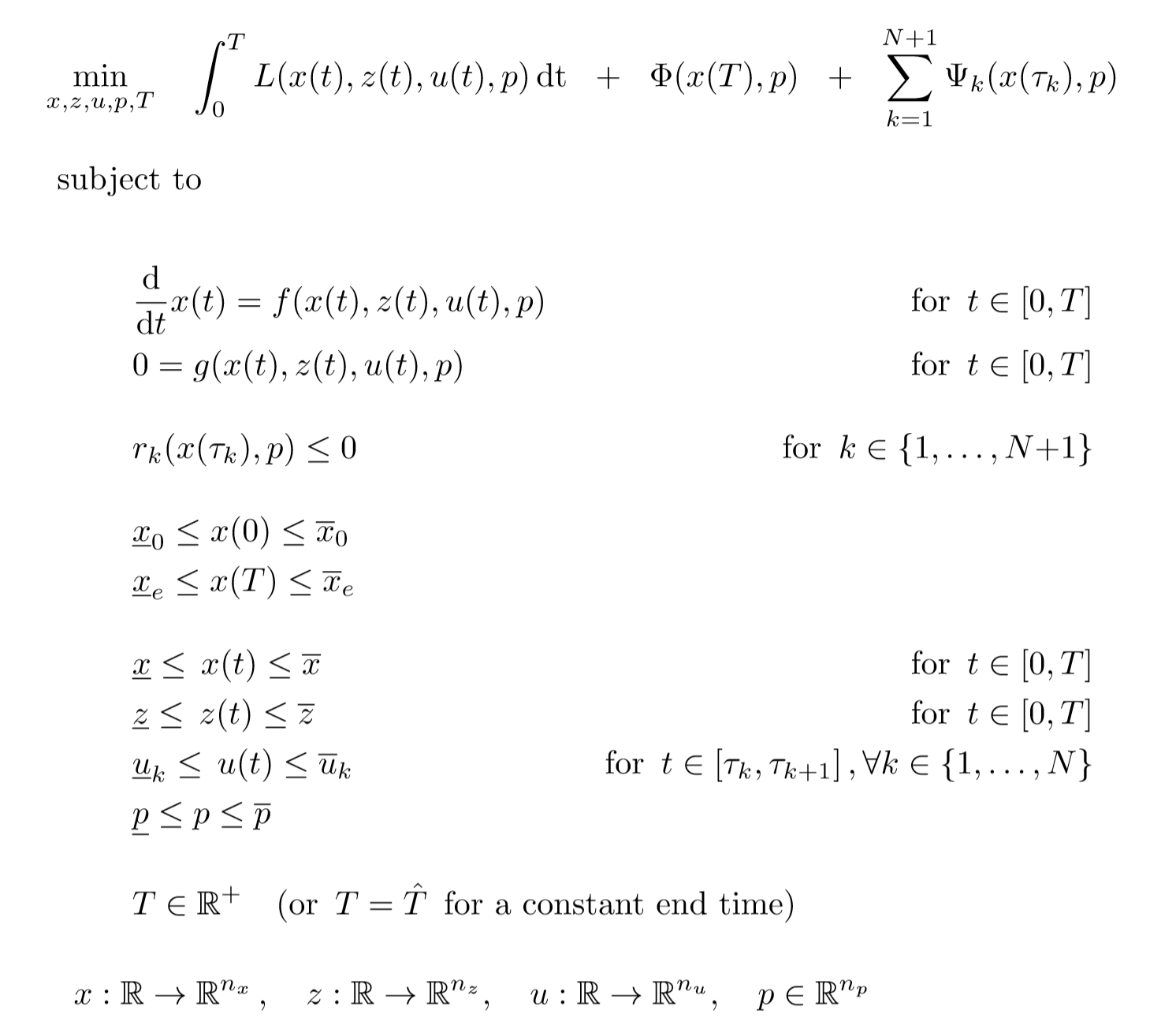 where $x(t)$ is the state trajectory, $u(t)$ the control trajectory, $z(t)$ the algebraic state trajectory, $p$ the parameters, $L(x,z,u,p)$ the path cost function, $\Phi(x,p)$ the terminal cost function, $\Psi_k(x,p)$ the grid-cost function, $f(x,z,u,p)$ the system dynamics function (differential equation), $g(x,z,u,p)$ the algebraic constraints function, $r_k(x,p)$ the grid-constraints function. Note that the control bounds can be specified of each control interval, $\underline{u}_k$, $\overline{u}_k$.
where $x(t)$ is the state trajectory, $u(t)$ the control trajectory, $z(t)$ the algebraic state trajectory, $p$ the parameters, $L(x,z,u,p)$ the path cost function, $\Phi(x,p)$ the terminal cost function, $\Psi_k(x,p)$ the grid-cost function, $f(x,z,u,p)$ the system dynamics function (differential equation), $g(x,z,u,p)$ the algebraic constraints function, $r_k(x,p)$ the grid-constraints function. Note that the control bounds can be specified of each control interval, $\underline{u}_k$, $\overline{u}_k$.
If no algebraic states $z$ are defined, the system is described by an ordinary differential equation. If algebraic states are defined, then the dynamics function $f(x,z,u,p)$ together with the algebraic constraints function $g(x,z,u,p)$ define the system dynamics as a differential algebraic equation in the semi-implicit form. To solve an optimal control problem, the index of the differential algebraic equation has to be smaller than or equal to one.
The dimension of the variables are: number of states $n_x$ , number of algebraic states $n_z$, number of controls $n_u$, number of parameters $n_p$.
Single stage optimal control problems are implemented using the class ocl.Problem.
Multi-stage optimal control problems
Multi-stage problems (also called multi-phase problems) allow you to define a different system dynamics function for each of the stages. This formulation also allows you to implement discrete events where a jump in the state trajectory happens.

where $M$ is the number of stages, and $\phi_i$ is the stage transition function that relates the first state $x_{i+1}$ of stage $i{+}1$ to the last state $x_i$ of stage $i$ (at timepoint $T_i$).
All other functions and bounds can be specified for each stage as described above in the single-stage formulation. Stages are implemented using the class ocl.Stage, and the complete multi-stage problem can then be implemented using the class ocl.MultiStageProblem.
ocl.Constraint()
The constraint handler allows to add constraints to the optimal control problem definition.
Methods
- add(lhs, op, rhs)
- Adds a constraint to the optimal control problem.
Arguments:
- lhs (ocl.Variable or Matlab matrix)
- Left hand side of the constraint equation
- op (char)
- One of the following operators as a string: ‘<=’, ‘==’, ‘>=’
- rhs (ocl.Variable or Matlab matrix)
- Right hand side of the constraint equation
- userdata()
- Returns the userdata object that can be passed to ocl.Problem or ocl.Stage.
ocl.Cost()
The cost handler allows to add cost terms in a cost function definition.
Methods
- add(cost)
- Adds a cost term.
Arguments:
- cost (ocl.Variable or Matlab matrix)
- Scalar variable containing the cost
- userdata()
- Returns the userdata object that can be passed to ocl.Problem or ocl.Stage.
ocl.DaeHandler()
The differential equations handler allows to specify the system equations which can be of ODE and DAE type.
Methods
- setODE(id, equation)
- Adds a differential equation to the system. Note that for every state variable defined in the variables function, a differential equation must be specified.
Arguments:
- id (string)
- Name of the state variable for that the differential equation is given.
- equation (ocl.Variable or Matlab matrix)
- The equation specifies the derivative of a state variable. Right hand side of the differential equation dot(x) = f(x,z,u,p) for state variable x.
- setAlgEquation(equation)
- Adds an algebraic equation to the system. Note that in order to be able to simulate the system, the total number of rows of the algebraic equations needs to be equal to the total number/dimension of algebraic variables.
Arguments:
- equation (ocl.Variable or Matlab matrix)
- Algebraic equation g in the form g(x,z,u,p)=0
- userdata()
- Returns the userdata object that can be passed to ocl.Problem or ocl.Stage.
ocl.MultiStageProblem(stages, transitions, userdata)
Creates a multi-stage optimal control problem (multiple phases).
Arguments:
- stages (cell<ocl.Stage>)
- List (cell-array) of stages.
- transitions (cell<ocl.Transition>)
- List (cell-array) of transitions. The number of transitions has to be one less than the number of stages.
- userdata (Any type, for example a struct or list.)
- A data field that can be used to pass any kind of constant data to the model functions. The userdata can be accessed by using the
userdataproperty ofocl.Cost,ocl.Constraint,ocl.DaeHandler, andocl.VarHandler. Defaults to an empty list.
Returns:
- (ocl.MultiStageProblem)
- The problem object.
Methods
- getInitialGuess()
- Use this method to retrieve a first initial guess that is generated from the bounds. You can further modify this initial guess to improve the solver performance.
Returns:
- (cell<OclVariable>)
- Structured variable for setting the initial guess for each stage (given as cell array).
- solve(initialGuess)
- Calls the solver and starts doing iterations.
Arguments:
- initialGuess (cell<OclVariable>)
- Structured variable containing the initial guess for each stage (given as cell array).
Returns:
- (cell<OclVariable>)
- The solution of the OCP for each stage (given as cell array).
- (cell<OclVariable>)
- Time points of the solution
ocl.Problem(T, vars, dae, pathcosts, gridcosts, gridconstraints, terminalcost, casadi_options, N, d, verbose, userdata, nlp_casadi_mx, controls_regularization, controls_regularization_value)
Creates a single-stage optimal control problem.
function vanderpol
problem = ocl.Problem(10, @varsfun, @daefun, @pathcost, 'N', 30);
problem.setInitialBounds('x', 0);
problem.setInitialBounds('y', 1);
problem.initialize('x', [0 1], [-0.2 -0.2]);
[solution,timepoints] = problem.solve();
% plotting of control and state p trajectory:
ocl.plot(timepoints.controls, solution.controls.u)
ocl.plot(timepoints.states, solution.states.p)
end
function varsfun(vh)
vh.addState('x', 'lb', -0.25, 'ub', inf);
vh.addState('y');
vh.addControl('F', 'lb', -1, 'ub', 1);
end
function daefun(daeh,x,z,u,p)
daeh.setODE('x', (1-x.y^2)*x.x - x.y + u.F);
daeh.setODE('y', x.x);
end
function pathcost(ch,x,z,u,p)
ch.add( x.x^2 );
ch.add( x.y^2 );
ch.add( u.F^2 );
end
Arguments:
- T (numeric or [])
- The end time/horizon length of the optimal control problem. If your system equations are expressed as function of an independent variable other than time,
Trepresents not the end time but the endpoint of the integration over the independent variable. If you would like to optimize for time in a time optimal control formulation pass the empty list[]. - vars (@(vh))
- System variables function. Defaults to an empty function handle.
- dae (@(daeh,x,z,u,p))
- DAE (system equations) function. Defaults to an empty function handle.
- pathcosts (@(costh,x,z,u,p))
- Path-cost function. Defaults to a function handle returning
0. - gridcosts (@(costh,k,K,x,p))
- Grid-cost function. Defaults to a function handle returning
0. - gridconstraints (@(conh,k,K,x,p))
- Grid-constraints function. Defaults to no constraints added.
- terminalcost (@(ch,x,p))
- Terminal cost function. Defaults to a function handle returning
0. - casadi_options (CasadiOptions)
- Options struct for casadi and ipopt.
- N (Integer)
- Number of control intervals. Defaults to
20. - d (Integer in [2,5])
- Degree of the interpolating polynomial in each control interval. Defaults to
3. - verbose (Boolean)
- If set to
falseno solver output will be shown. Defaults totrue. - userdata (Any type, for example a struct or list.)
- A data field that can be used to pass any kind of constant data to the model functions. The userdata can be accessed by using the
userdataproperty of ocl.Cost, ocl.Constraint, ocl.DaeHandler, and ocl.VarHandler. Defaults to an empty list. - nlp_casadi_mx (Boolean)
- If set to
true,casadi.MXsymbolics are used instead ofcasadi.SXsymbolics. Defaults tofalse. - controls_regularization (Boolean)
- If set to
true, a small cost on the control inputs is added depending on the weight given bycontrols_regularization_value. Defaults totrue. - controls_regularization_value (Float)
- The weight for the
controls_regularization. Defaults to1e-6.
Returns:
- (ocl.Problem)
- The Problem object.
Methods
- solve()
- Calls the solver and starts doing iterations.
Returns:
- (ocl.Variable)
- The solution of the OCP
- (ocl.Variable)
- Grid points of the solution
- solve(ig)
- Calls the solver and starts doing iterations.
Arguments:
- ig (ocl.Variable)
- An initial guess, for example from a previous solution.
Returns:
- (ocl.Variable)
- The solution of the OCP
- (ocl.Variable)
- Grid points of the solution
- setBounds(id, lb, ub)
- Sets a bound on a variable for the whole trajectory. If only the lower bound is given, it will be
lb==ub.
Arguments:
- id (string)
- The variable id
- lb (numeric)
- The lower bound
- ub (numeric,optional)
- The upper bound
- setInitialBounds(id, lb, ub)
- Sets an initial bound on a variable. If only the lower bound is given, it will be
lb==ub.
Arguments:
- id (string)
- The variable id
- lb (numeric)
- The lower bound
- ub (numeric,optional)
- The upper bound
- setEndBounds(id, lb, ub)
- Sets an end bound on a variable. If only the lower bound is given, it will be
lb==ub.
Arguments:
- id (string)
- The variable id
- lb (numeric)
- The lower bound
- ub (numeric,optional)
- The upper bound
- initialize(id, gridpoints, values)
- Sets an initial guess for a variable.
Arguments:
- id (string)
- The variable id
- gridpoints (numeric)
- The normalized gridpoints. The gridpoints is a list of values between
0and1where0is the beginning of the trajectory and1is the final time of the trajectory. - values (numeric)
- The initial guess values at the gridpoints. The number of columns of
valuesmust be equal to the length ofgridpoints.
ocl.Simulator(vars, dae)
Performs simulations of the system by integrating the system dynamics.
Arguments:
- vars (@(vars_handler))
- System variables function. Optional, defaults to an empty function handle.
- dae (@(dae_handler,x,z,u,p))
- DAE (system equations) function. Optional, defaults to an empty function handle.
Returns:
- (Simulator)
- the Simulator object.
Methods
- getStates()
- Returns a structured state variable that you can use to pass as the initial state to the simulator. All variable values default to zero.
Returns:
- (ocl.Variable)
- The states.
- getParameters()
- Returns a structured state variable that allows you to set parameters for the simulation. All parameter values default to zero.
Returns:
- (ocl.Variable)
- The parameters.
- reset(x0)
- Sets the initial state of the simulation.
Arguments:
- x0 (ocl.Variable or numeric)
- Initial state
- step(u, dt)
- Simulate one step using the control input.
Arguments:
- u (ocl.Variable or numeric)
- The controls
- dt (numeric)
- The timestep
Returns:
- (ocl.Variable)
- The state.
- (ocl.Variable)
- Algebraic variables.
ocl.Stage(T, vars, dae, pathcosts, gridcosts, gridconstraints, terminalcost, N, d, userdata)
The definition of a Stage.
stage = ocl.Stage([], @vars, @ode, 'N', 10, 'd', 2);
% Function definitions can be in the same file
% (if the main script is wrapped by a function)
% or in separate files:
function vars(sh)
sh.addState('s');
sh.addState('v');
end
function ode(sh,x,~,~,~)
sh.setODE('s', x.v);
sh.setODE('v', -10);
end
Arguments:
- T (numeric or [])
- The end time/horizon length of the optimal control problem. If your system equations are expressed as function of an independent variable other than time,
Trepresents not the end time but the endpoint of the integration over the independent variable. If you would like to optimize for time, time optimal control, pass the empty list[]. - vars (@(vh))
- System variables function. Defaults to an empty function handle.
- dae (@(daeh,x,z,u,p))
- DAE (system equations) function. Defaults to an empty function handle.
- pathcosts (@(costh,x,z,u,p))
- Path-cost function. Defaults to a function handle returning
0. - gridcosts (@(costh,k,K,x,p))
- Grid-cost function. Defaults to a function handle returning
0. - gridconstraints (@(conh,k,K,x,p))
- Grid-constraints function. Defaults to no constraints added.
- terminalcost (@(ch,x,p))
- Terminal cost function. Defaults to a function handle returning
0. - N (Integer)
- Number of control intervals. Defaults to
20. - d (Integer in [2,5])
- Degree of the interpolating polynomial in each control interval. Defaults to
3. - userdata (Any type, for example a struct or list.)
- A data field that can be used to pass any kind of constant data to the model functions. The userdata can be accessed by using the
userdataproperty ofocl.Cost,ocl.Constraint,ocl.DaeHandler, andocl.VarHandler. Defaults to an empty list.
Methods
- setBounds(id, lb, ub)
- Sets a bound on a variable for the whole trajectory. If only the lower bound is given, it will be
lb==ub.
Arguments:
- id (string)
- The variable id
- lb (numeric)
- The lower bound
- ub (numeric,optional)
- The upper bound
- setInitialBounds(id, lb, ub)
- Sets an initial bound on a variable. If only the lower bound is given, it will be
lb==ub.
Arguments:
- id (string)
- The variable id
- lb (numeric)
- The lower bound
- ub (numeric,optional)
- The upper bound
- setEndBounds(id, lb, ub)
- Sets an end bound on a variable. If only the lower bound is given, it will be
lb==ub.
Arguments:
- id (string)
- The variable id
- lb (numeric)
- The lower bound
- ub (numeric,optional)
- The upper bound
- initialize(id, gridpoints, values)
- Sets an initial guess for a variable.
Arguments:
- id (string)
- The variable id
- gridpoints (numeric)
- The normalized gridpoints. The gridpoints is a list of values between
0and1where0is the beginning of the trajectory and1is the final time of the trajectory. - values (numeric)
- The initial guess values at the gridpoints. The number of columns of
valuesmust be equal to the length ofgridpoints.
ocl.Variable()
The ocl.Variable type is the basic structure to retrieve, store, modify structured optimization variables. You can access subvariables by their name like the state trajectory or the control variables.
% v is a solution of an OCP
% p=[px;py;pz] is of size 3x1
% p trajectory is of size 3x(N+1)
% F trajectory is of size 1xN
% with N control intervals
p = v.states.p; % get state p trajectory
F = v.controls.F; % get control F trajectory
% set all 3x1 p states to the same value
v.states.p = [3;2;1];
% set p states 4 and 5 in the trajectory
v.states.p(:,4:5) = [1,2,3;4,5,6].';
% set all px values of p in state trajectory
v.states.p(1,:) = 4;
% plotting of state p trajectory:
plot(t.states.value,v.states.p.value)
Methods
- get(id)
- Alternative syntax: var.id Gets a sub-variable of a variable. You can use the shorthand notation with the dot operator, e.g.: solution.states.x
Arguments:
- id (string)
- Name of the state variable
Returns:
- (ocl.Variable)
- the sub-variable of the given variable.
- set(value)
- Alternative syntax: var = value Sets a value to the variable.
Arguments:
- value (numeric)
- The value to be set. The value either has to be of the same dimension as the variable or if possible it will be repeated in some dimensions to fit the variable. Scalar values will be set to all entries of the variable. You can use the shorthand notation, e.g. initialGuess.states.x = [1,2,3]
- slice(dim1, dim2)
- Alternative syntax: var(dim1,dim2) Gets a slice of a variable. You can slice a variable the same way as you would index a matrix in Matlab/Octave which means linear indexing is also possible.
Arguments:
- dim1 (int, :, end)
- indizes for the first dimension. The indizes can be scalar, integer arrays, or you can use : or end.
- dim2 (int, :, end, optional)
- indizes for the second dimension. The indizes can be scalar, integer arrays, or you can use : or end.
Returns:
- (ocl.Variable)
- the sliced variable.
- value()
- Get the value of the variable. This is particularly useful if you want to plot the numeric values of the variable, for example for the solution. In system and OCP definition this gives you the underlying symbolic values.
Returns:
- (numeric or casadi.SX or casadi.MX or sym)
- the underlying value of the variable. The value can be either numeric (for initial guess and solution) or symbolic (in system/ocp definitions).
- disp()
- Display function of OclVariable. It shows the size of the variable, the names of the children variables, and a part of the value. The output of an OCP initial guess variable looks similar to:
Variable:
Size: [3681 1]
Type: OclStructure
Children: states, integrator, controls, parameters, time
Value: [100;2;1;0;0;0;0;0;0;0;0;0;0;0;0..]
ocl.VarsHandler()
The variables handler allows to specify the system variables, its dimensions and bounds.
Methods
- addState(id, s, lb=-inf, ub=inf)
- Adds a state variable to the system.
Arguments:
- id (char)
- Name of the state variable
- s (int, optional)
- Size of the state variable. Scalar, vector, and matrix valued variables are allowed. If a scalar value s is given, the size of the variable will be [s,1]. Defaults to [1,1].
- lb=-inf (numeric, optional)
- Lower bound on the variable. This value can be overwritten when you specify bounds for OclSolver with solver.setBound. Defaults to -inf.
- ub=inf (numeric, optional)
- Upper bound on the variable. This value can be overwritten when you specify bounds for OclSolver with solver.setBound. Defaults to inf.
- addAlgVar(id, s, lb=-inf, ub=inf)
- Adds an algebraic variable to the system.
Arguments:
- id (char)
- Name of the algebraic variable
- s (int, optional)
- Size of the algebraic variable. Scalar, vector, and matrix valued variables are allowed. If a scalar value s is given, the size of the variable will be [s,1]. Defaults to [1,1].
- lb=-inf (numeric, optional)
- Lower bound on the variable. This value can be overwritten when you specify bounds for OclSolver with solver.setBound. Defaults to -inf.
- ub=inf (numeric, optional)
- Upper bound on the variable. This value can be overwritten when you specify bounds for OclSolver with solver.setBound. Defaults to inf.
- addControl(id, s, lb=-inf, ub=inf)
- Adds an control input to the system.
Arguments:
- id (char)
- Name of the control variable
- s (int, optional)
- Size of the control variable. Scalar, vector, and matrix valued variables are allowed. If a scalar value s is given, the size of the variable will be [s,1]. Defaults to [1,1].
- lb=-inf (numeric, optional)
- Lower bound on the variable. This value can be overwritten when you specify bounds for OclSolver with solver.setBound. Defaults to -inf.
- ub=inf (numeric, optional)
- Upper bound on the variable. This value can be overwritten when you specify bounds for OclSolver with solver.setBound. Defaults to inf.
- addParameter(id, s, default=[])
- Adds a parameter.
Arguments:
- id (char)
- Name of the parameter
- s (int, optional)
- Size of the control variable. Scalar, vector, and matrix valued variables are allowed. If a scalar value s is given, the size of the variable will be [s,1]. Defaults to [1,1].
- default=[] (numeric, optional)
- Default value for the parameter. This value can be overwritten when you specify the parameter for OclSolver with solver.setParameter. Defaults to unbounded.
- userdata()
- Returns the userdata object that can be passed to ocl.Problem or ocl.Stage.
@(conh, k, K, x, p)
Function signature for the grid constraints function.
Arguments:
- conh (ocl.Constraint)
- Constraints handler that allows to add constraints.
- k (int)
- Current grid point index
- K (int)
- Largest (last) grid point index
- x (ocl.Variable)
- States
- p (ocl.Variable)
- Parameters
@(costh, k, K, x, p)
Function signature for the grid cost function.
Arguments:
- costh (ocl.Cost)
- Cost handler that allows to add cost terms.
- k (int)
- Current grid point index
- K (int)
- Largest (last) grid point index
- x (ocl.Variable)
- States
- p (ocl.Variable)
- Parameters
@(costh, x, z, u, p)
Function signature for the path cost function.
Arguments:
- costh (ocl.Cost)
- Cost handler
- x (ocl.Variable)
- State variables
- z (ocl.Variable)
- Algebraic states
- u (ocl.Variable)
- Controls
- p (ocl.Variable)
- Parameters
@(daeh, x, z, u, p)
Function handle signature for DAE function.
Arguments:
- daeh (ocl.DaeHandler)
- DAE handler
- x (ocl.Variable)
- State variables
- z (ocl.Variable)
- Algebraic states
- u (ocl.Variable)
- Controls
- p (ocl.Variable)
- Parameters
@(vh)
Function handle signature for system variables function.
Arguments:
- vh (ocl.VarsHandler)
- Variables handler
CasadiOptions()
Creates an options struct for ocl.Problem. Check the casadi documentation and the ipopt documentation to see which options are available. The ipopt options can be set in ‘casadi_options.ipopt’. The default values are the following:
casadi_options = struct;
casadi_options.ipopt = struct;
casadi_options.ipopt.linear_solver = 'mumps';
casadi_options.ipopt.hessian_approximation = 'exact';
Returns:
- (struct)
- the options struct.